(1)弧焊用機器人的基本功能
(1) Basic functions of arc welding robots
弧焊過程比點焊過程要複雜得多,工具中心點(TCP),也就是焊絲(si) 端頭的運動軌跡、焊槍姿態、焊接參數都要求精確控製。所以,弧焊用機器人除了前麵所述的一般功能外,還必須具備一些適合弧焊要求的功能。
The arc welding process is much more complex than the spot welding process, and precise control is required for the tool center point (TCP), which is the movement trajectory of the welding wire end, the posture of the welding gun, and the welding parameters. So, in addition to the general functions mentioned earlier, arc welding robots must also have some functions that are suitable for arc welding requirements.
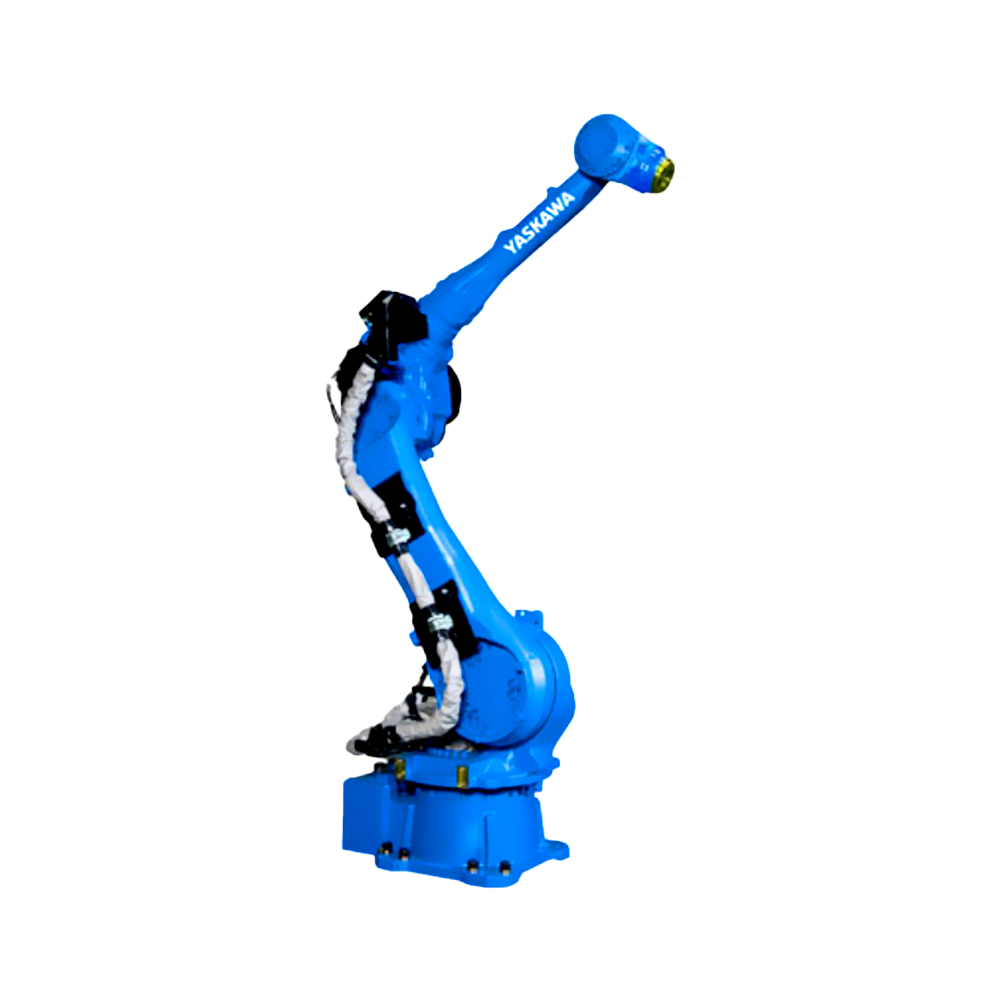
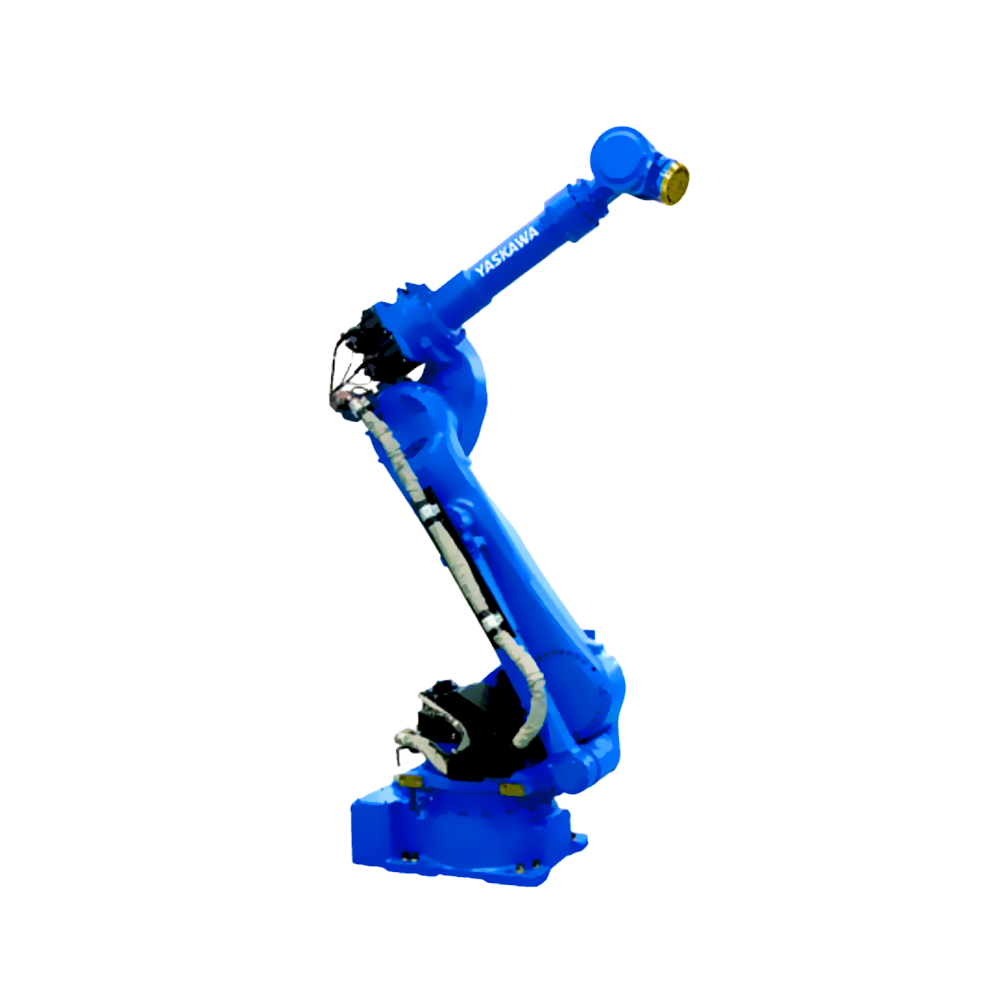
雖然從(cong) 理論上講,有5個(ge) 軸的機器人就可以用於(yu) 電弧焊,但是對複雜形狀的焊縫,用5個(ge) 軸的機器人會(hui) 有困難。因此,除非焊縫比較簡單,否則應盡量選用6軸機器人。
Although theoretically, a robot with 5 axes can be used for arc welding, it can be challenging to use a robot with 5 axes for complex shaped welds. Therefore, unless the welding seam is relatively simple, a 6-axis robot should be chosen as much as possible.

焊接
welding
弧焊機器人除在作“之”字形拐角焊或小直徑圓焊縫焊接時,其軌跡應能貼近示教的軌跡之外,還應具備不同擺動樣式的軟件功能,供編程時選用,以便作擺動焊,而且擺動在每一周期中的停頓點處,機器人也應自動停止向前運動,以滿足工藝要求。此外,還應有接觸尋位、自動尋找焊縫起點位置、電弧跟蹤及自動再引弧功能等。
The arc welding robot should not only have a trajectory that is close to the taught trajectory when performing zigzag corner welding or small diameter circular welding, but also have software functions with different swing styles for programming to choose from for swing welding. Moreover, at the pause point of each cycle, the robot should automatically stop moving forward to meet the process requirements. In addition, it should also have functions such as contact positioning, automatic finding of the starting position of the weld seam, arc tracking, and automatic re arc ignition.
(2)弧焊機器人用的焊接設備
(2) Welding equipment for arc welding robots
弧焊機器人多采用氣體(ti) 保護焊方法(MAG、MIG、TIG),通常的晶閘管式、逆變式、波形控製式、脈衝(chong) 或非脈衝(chong) 式等的焊接電源都可以裝到機器人上作電弧焊。由於(yu) 機器人控製櫃采用數字控製,而焊接電源多為(wei) 模擬控製,所以需要在焊接電源與(yu) 控製櫃之間加一個(ge) 接口。
Arc welding robots often use gas shielded welding methods (MAG, MIG, TIG). Common welding power sources such as thyristor, inverter, waveform control, pulse or non pulse can be installed on the robot for arc welding. Due to the use of digital control in the robot control cabinet and the fact that the welding power supply is mostly analog control, it is necessary to add an interface between the welding power supply and the control cabinet.
更多的關(guan) 於(yu) 弧焊機器人問題或者詳細的內(nei) 容,請進入我們(men) 公司的網站:https://www.wobeier.com網站中會(hui) 有很多的內(nei) 容僅(jin) 供參考
For more information or detailed information about arc welding robots, please visit our company's website: https://www.wobeier.com There will be a lot of content on the website for reference only